株式会社NTTドコモ様
久留米工業大学×NTTドコモの電動車椅子遠隔操縦システム
docomo MECとintdashの組み合わせにより電動車椅子の低遅延な遠隔制御を実現

プロジェクト概要
アプトポッドは、高速IoTプラットフォーム「 intdash 」によるモビリティの遠隔操縦を行うサービスの提供を行っております。
株式会社NTTドコモ(以下、ドコモ)は、久留米工業大学が開発した自律走行電動車椅子に対する、5G網およびdocomo MEC(※1,2)上の「 intdash 」を利用した電動車椅子の遠隔操縦システムを提供しました。
プロジェクトの背景
介護業界で深刻な人手不足の解消のため、久留米工業大学は目的地への自動走行が可能な電動車椅子の開発を担当しました。自動走行中の不慮の事態を回避するため、久留米工業大学としては遠隔で制御できる機能が必要と考え、それに対してドコモは電動車椅子に対する遠隔制御システムの開発を行いました。操作しているのは離れた場所にいる介助者役の人です。
通信手段として新しい通信規格である5G技術を使います。5Gは高速・大容量の通信が特徴で、少ないタイムラグで情報のやりとりが出来るようになったため、介助者は、ほぼリアルタイムで映像の確認や電動車椅子の操作が可能となります。これにより、障害物や人をうまくよけながら遠隔制御による走行が実現できます。
また、intdashは不安定な通信状況でも安定したデータ伝送や再送処理が可能となるため、更に5Gと組み合わせることにより、高速・安定した遠隔操縦システムの構築が可能となります。
プロジェクトのシステム概要
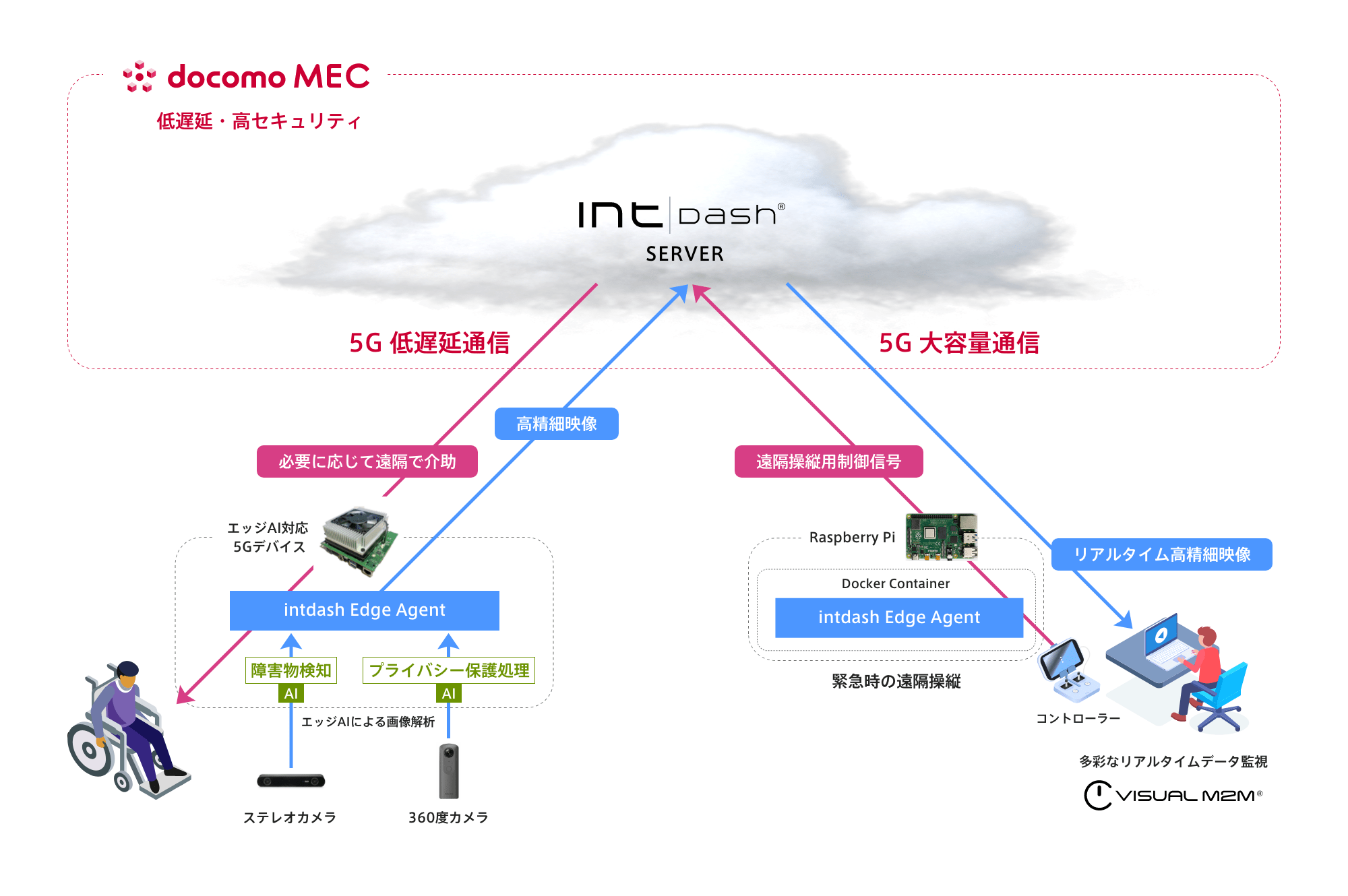
ドコモのMECサービス「docomo MEC™」上にintdashサーバを配置し、5G網にてモビリティの遠隔操縦を行います。モビリティに搭載されたエッジAI対応5Gデバイスにはカメラと5Gモジュールが接続されており、遠隔地でモビリティから送られてくる映像を確認しながらコントローラで操作することでモビリティの制御を行います。
カメラ映像はエッジでAI処理され、顔検出+モザイク加工で匿名化されます。360度カメラも搭載し、周囲のヒトを検出してData Visualizerのカスタムパーツでソナー表示を行うことにより、操縦者は周囲の状況を把握しながら安心、安全な操縦を行うことが可能となります。また、汎用性を高めるため、マルチベンダのコントローラへの対応、コントローラ側のintdash Edge AgentのDockerコンテナ化を実現しています。
【システム概要図】
本システム運用への期待
今後は対象モビリティをロボットやドローンなど多様なデバイスに拡張し、さまざまなケースでのモビリティ遠隔制御を実現してまいります。少子高齢化社会におけるICTを活用した労働力不足の解消や、居住地、年齢、性別、国籍といった属性に囚われず誰もが自由に働ける継続的な社会インフラの構築を通じて、社会課題の解決を目指します。
今後の展望
ドコモとアプトポッドは、今後本サービスのユースケース拡大を視野に、共同でプラットフォームビジネスの拡大を行なっていく予定です。アプトポッドは引き続き本プロジェクトの安定稼働と拡張に寄与して参ります。
※1「docomo MEC」は株式会社NTTドコモの商標です。
※2「docomo MEC」は5G×MEC(Multi-access Edge
Computing)を活用したクラウドサービスであり、MECによる低遅延・閉域網による高セキュリティを実現しています。